|
Networked Robotics Corporation
Toll
free support
877 FRZ TEMP
877 GLP TEMP
|
Six Rules of our Architecture for Integration of Scientific Data Types
updated March 2023
Introduction
This document discusses Networked
Robotics' architecture for network data collection. The Networked
Robotics approach relies on modular and mutable electronic hardware to
accomplish integrated real-time data collection from diverse scientific
instruments from multiple vendors. The discussion section compares our approach to that of
current standards in networking and automation.
From Networked Robotics' point-of-view
enabling common real-time data collection from diverse scientific
instruments and sensors is primarily an act of complexity reduction. We
reduce the problem into two main classes of complexity 1) Physical, the different
kinds of electronics and connectors that are used to talk to other devices
and 2) Logical, the computer languages that each machine uses to talk to
the outside world.
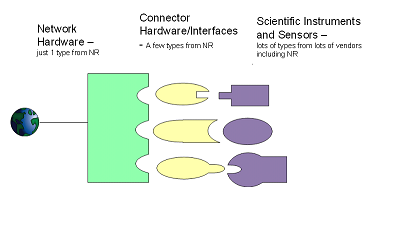
In our approach, physical complexity is reduced
according to the diagram below - via a
modular hardware implementation, the hardware elements of the system are 1) the
network data collection server, a computer anywhere on the network (
not shown) 2) specialized network hardware (green) 3) An interface
(yellow) and 4) the "monitored device", which by our definition are either
scientific instruments or sensors, (purple), but could also be
manufacturing machines, toasters, or any other entity that produces data.
Examples of "purple" might include
scientific incubators, liquid nitrogen cryofreezers, radiation sensors,
gas sensors, analog probes, switches, ovens, stability cabinets, PH meters and
many more. Examples of their physical data communication methods
might include voltage outputs,
RS-232, RS-485,
TTL, I2C, ethernet,
switches, binary outputs,
4-20 milliamp, etc.
The logical complexity-reduction in the process is
handled by our network hardware's ability to 1) understand and unify data
collection protocols for multiple machine languages, and 2 ) to "learn"
new machine languages for new "purple" devices via network downloadable
firmware (.NRF or Networked Robotics Firmware files).
In our approach there are 3 possible levels of
message-passing, 1) from a network data collection server (e.g. a
Tempurity Server) to the Networked Robotics NTMS network hardware 2) from
NTMS network hardware to a Networked Robotics interface, and 3) from the
interface to the "monitored device", or the sensor or instrument that
produces data. The levels are
increasingly complex. Level 3 reflects the full diversity of how engineers
choose to implement the ability for their device to talk to the "outside
world".
The six "rules" of how this system is
implemented by Networked Robotics are specified below..The
rules limit capability in some respects (precision, the delinking of metadata)
but provide the ability to collect data from any source in a common way
across the entire pantheon of instrumentation and sensors, and to provide
a common interface that allows any analyzing process to use it.
The rules are based on control, the
command of scientific data streams in the device's own language. Here they are:
The 6 Rules of Networked Robotics' Simplified Method of Integrated Real-time Network Data
Collection:
1) Network Master:
The network controls data
collection. Monitored devices are queried through the network via the NTMS
network hardware. They must be able to respond to a request for data. Data
is always requested by the network data collection service. The monitored
device is always a service to the Networked Robotics' NTMS hardware and
thus to the data collection server on the network.
Networked Robotics' NTMS hardware units poll monitored
devices for data even in the absence of network commands requesting data.
Network-side commands return the last-read value of the monitored device
stored in the NTMS. This principle is designed to reduce data collection
latency and to work with widely varying data collection intervals for
scientific instruments and sensors. In our approach there is no guarantee
that a network-commanded reading will result in a new value.
2) Network Immutability:
Stored data values
at the data collection server
are the same as the values that are sent by Networked Robotics' NTMS
network hardware. The datum that is stored
is in the same form that it is when it leaves the NTMS, but is probably not
in the same form that it was in when it leaves the instrument because
the NTMS may convert the data format, including its precision. In many cases the NTMS
commands data acquisition but drops all
irrelevant (not requested by the network data collections service) data,
making available only the requested information of interest to the data
collection server.
3) Network Metadata Assignment:
The monitored device
type (e.g. humidity, co2 concentration, id, temperature) is determined by
the network command/response sent to the NTMS by the data collection
service. The "tagging" of parameters by a device's own machine language is
thus irrelevant to the network data collection service. (It is relevant
for NTMS firmware performance) A voltage request by the data
collection server always returns a voltage or an error. A temperature
request always returns a temperature or an error. The network data
collection service thus relies on the NTMS network hardware to accurately
relay the correct data type based on its understanding of the target
machine connected and its machine language.
4) Network Command Single Response:
Only one monitored device type ( e.g. humidity, co2, id,
temperature) response value is returned for each query by the network data
collection server. As described above, in
most cases the NTMS drops all irrelevant data, taking only the requested
information of interest all the way to the data collection server.
Responses by many instruments are thus "filtered" by the network hardware
or interface modules.
5) Network Command Equivalence:
The network commands
issued to read data from a single monitored device type (temperature,
humidity, carbon dioxide concentration) from any of very
many diverse monitored devices is always equivalent on the network side
regardless of the monitored device (instrument, brand, or model) from which data is to be collected. Although "local" commands (the monitored device's logical protocol) are diverse and specific to the monitored device,
the network commands for acquiring these same parameters from any
monitored device are standard.
6) Universal Time:
Each network-collected
datum is tagged with a
universal time at the time of acquisition.
Discussion:
Several powerful standards exist for industrial control
and automation, building control and automation, scientific automation,
and network control and automation. In automation Modbus is common,
and many scientific instruments support versions of Modbus protocols. Bacnet, with origins in the building control world provides an excellent
protocol for collecting data.SNMP has effectively unified the world of
network devices.
Modbus and
Bacnet in our opinion suffer from their roots
in industrial automation. Bacnet unique IDs are superfluous in a
network world where MAC addresses are already unique and well-controlled
and ubiquitous. Modbus suffers from a lack of simplicity such that there are so many
potential implementations that the standard becomes a non-standard.
Rule 5 above for command single-response is a feature of
Modbus and of SNMP.
Of all the standards Networked Robotics agrees with the
philosophy of SNMP the most because of the word "simple" in Simple Network
Management Protocol. SNMP reduces the complexity of message-passing to 5
simple types that are able to obtain virtually any form of data and
metadata with fast response times.
All existing standards fail to address a key new
ability, that is for devices to "learn" through net-upgradeable
firmware. Some will say that this is true of SNMP MIBs for example,
but MIBs are essentially tree-based data structures that do not include
the possibility of instrument-wide reprogramming of functions and methods.
Scientific instruments and sensors are engineered by
people with their own idea of which standard or implementation to follow. The Networked Robotics approach takes the integration out of the hands of
these engineers such that any implementation that they follow is capable
of being addressed and integrated via our architecture which acts as an
intermediate level of complexity-reduction.
This approach currently applies only to constantly-collected
real-time data such as environmental data and not to "batch" collections
such as those in chromatographic or mass spectographic runs.
Data collection speeds are expected to be slow compared to bandwidth
limits. What is slow? In the past the network was criticized as a vehicle
for real-time data.
The internet is non-deterministic. It is difficult to tell when
competing packets will come in that will delay
data collection. It would not be appropriate to base millisecond decisions
on network-collected data. The kind of environmental data that we
collect from is much slower. The latency of data collection for a single
packet across the planet now is generally the
speed of light across
oceans. Internet (TCP/IP) Messages from anywhere on the planet
arrive at 500 milliseconds or faster - only 7.5 times the
theoretical maximum of 67 milliseconds. That means that from anywhere
on the planet one-way latencies less than a second are now a
safe bet, which makes internet data collection pretty deterministic
for many applications across the globe.
Perhaps the most important rule is number 6. Universal time is independent of time zone but can be easily converted to
a local time. Although storage of local time with time zone would be
equivalent, most applications ignore time zone, assuming that the time
zone is irrelevant because the data will be used locally. Networked
Robotics assumes the opposite, that all data will be used globally.
back to Support / Tutorials |